GFM4MPM: Towards Geospatial Foundation Models for Mineral Prospectivity Mapping
Jan 1, 2024
Enabling Scalable Mineral Exploration: Self-Supervision and Explainability
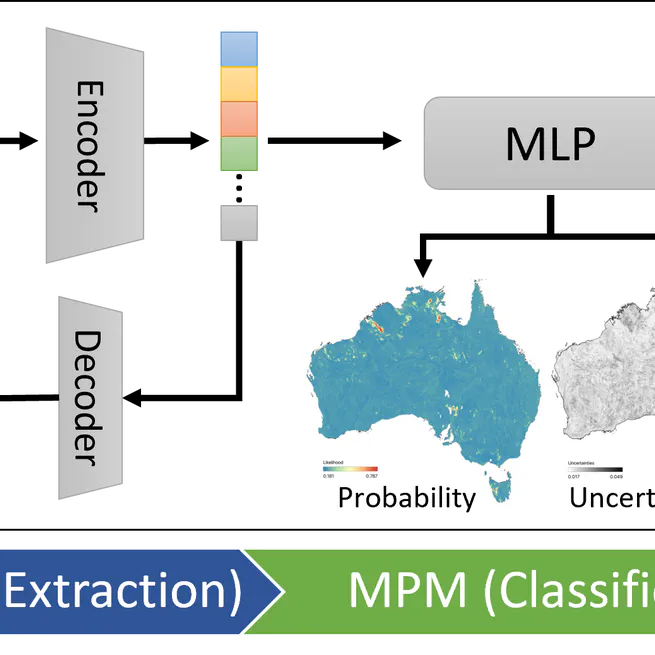
This work introduces a unified framework for Mineral Prospectivity Mapping that combines self-supervised learning, explainable AI, and uncertainty modeling to overcome challenges in deep learning caused by limited labeled data and interpretability. The approach improves prediction robustness and provides geologically meaningful insights, demonstrated through evaluations on Zn–Pb deposits in North America and Australia.
Jan 1, 2024
Explainable knowledge graph embedding: Inference reconciliation for knowledge inferences supporting robot actions
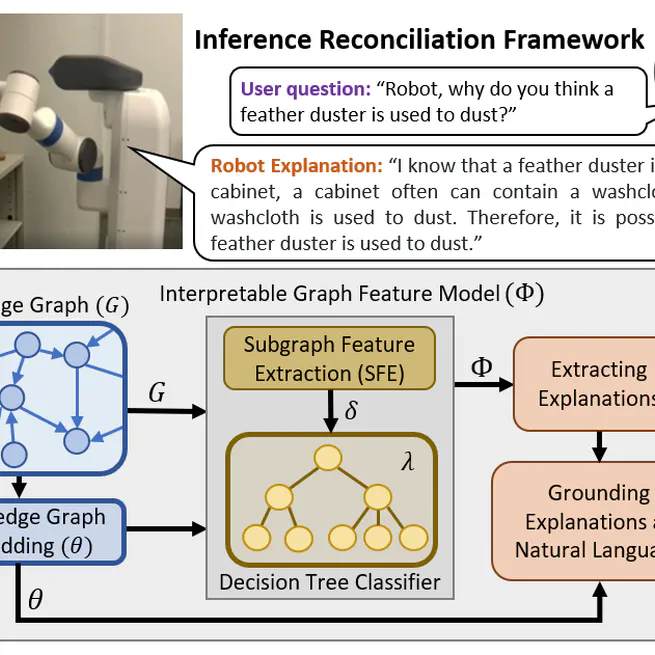
This work proposes an inference reconciliation framework that uses decision tree-based local approximations and natural language explanations to interpret black-box knowledge graph embeddings driving robot behavior. Evaluations show that the approach helps non-experts understand and correct erroneous robot actions caused by flawed internal beliefs.
Jan 1, 2022
Towards robust one-shot task execution using knowledge graph embeddings
Jan 1, 2021
Situated bayesian reasoning framework for robots operating in diverse everyday environments
Jan 1, 2020
Path ranking with attention to type hierarchies
Jan 1, 2020
Cage: Context-aware grasping engine
Jan 1, 2020

Taking recoveries to task: Recovery-driven development for recipe-based robot tasks
This work introduces Recovery-Driven Development (RDD), an iterative task scripting approach that simplifies the development of robust robot systems by separating task and recovery logic and enabling situated testing. The effectiveness of RDD is demonstrated through its successful application in a challenge-winning mobile manipulator at the IEEE 2019 FetchIt! Challenge.
Jan 1, 2019
Robocse: Robot common sense embedding
Jan 1, 2019