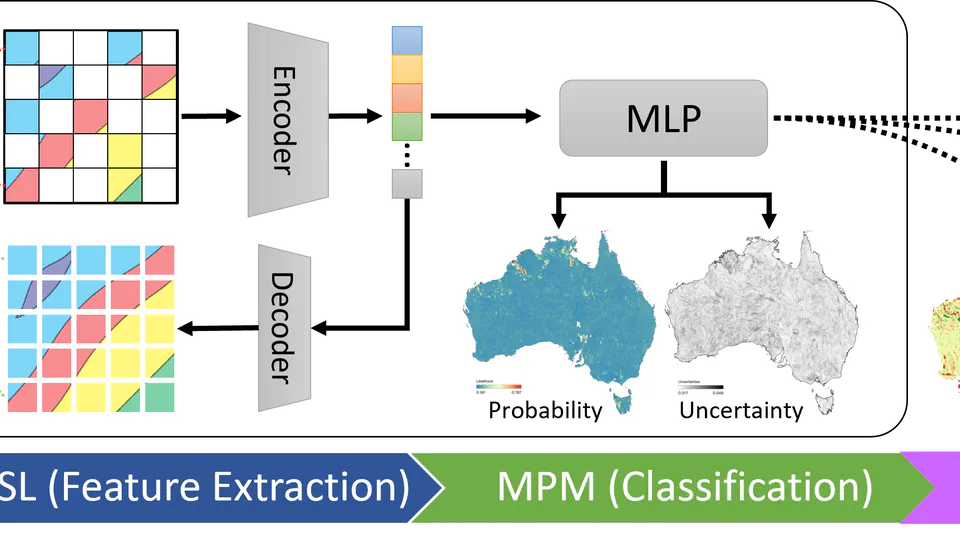

🎉 Coauthored Proposal and Participated in DARPA CriticalMAAS
Served as technical lead to design machine learning software for mineral potential mapping exploiting multi-modal fusion
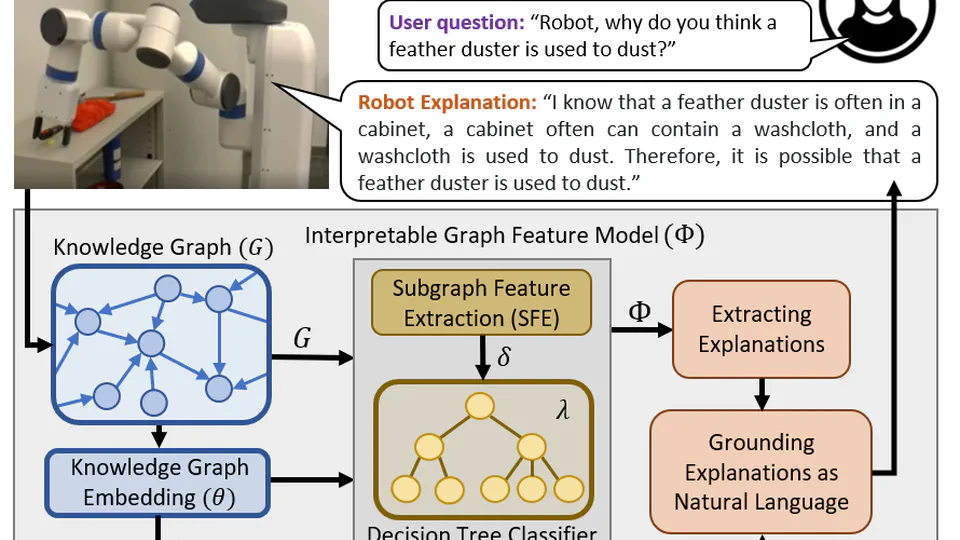
Angel Daruna is a computer scientist with the SUN lab of the SRI Center for Vision Technologies. His research interests include machine learning, geospatial intelligence, robotics, and knowledge graphs.
PhD Robotics
Georgia Insitute of Technology
MSc Computer Science
Georgia Insitute of Technology
BSc Computer Engineering
Georgia Institute of Technology
Served as technical lead to design machine learning software for mineral potential mapping exploiting multi-modal fusion